

10 Most Common Failures in Electric Motors
From manufacturing to ventilation systems, electric motors are used very widely. With motors becoming increasingly more technological and more complex, it must be kept in mind that the causes of motor and drive problems are not limited to a single area of expertise and that both mechanical and electrical problems can cause motor failures, which can lead to significant costs and unplanned downtime. This article addresses 10 most common failures encountered in electric motors.
Transient Voltages
Transient voltages can come from a range of sources from inside or outside of the facility. These transients, which may vary in terms of amplitude and frequency, can cause wears or damage the integrity of the insulation in motor windings. Finding the source of these transients may be difficult as these events do not occur frequently and the symptoms may present themselves in different ways.
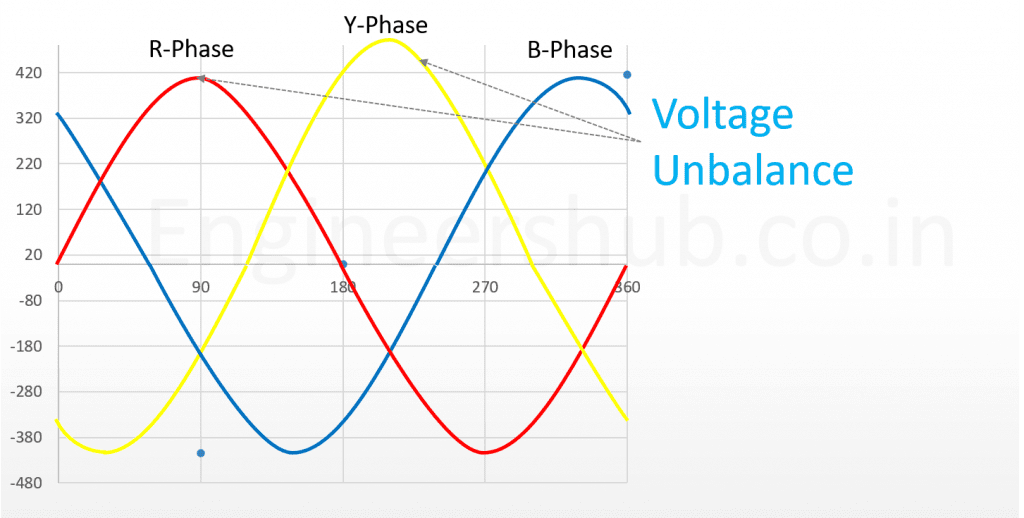
Voltage Imbalance
Three-phase distribution systems generally serve single-phase loads. An imbalance in the impedance or load distribution can contribute to imbalance in all three phases. Potential faults might be in the cables that go to the motor, in the terminations of the motor and potentially in the windings themselves. This imbalance may cause voltages in each of the phase circuits in a three-phase power system. At the simplest level, all three phases of voltage must have the same magnitude at all times.
Harmonics
Simply put, harmonics are any unwanted additional high frequency AC voltage or current source that supply power to motor windings. This additional energy is not used to rotate the motor shaft, but circulates in the windings and ultimately contributes to internal energy losses. These losses dissipate in the form of heat, which deteriorates the insulation capability of the windings over time.
Sigma Currents
Sigma currents are essentially stray currents that circulate in the system. Sigma currents occur as a result of the signal frequency, voltage level, capacitance and inductance in the conductors. These circulating currents can find their way by going through protective grounding systems, which can cause nuisance tripping or excess heat in the windings in certain cases. Sigma current can be found in motor cables and is the sum of the currents of all three phases at any time. In the perfect state, the sum of all three currents will equal zero. In other words, the return current coming from the drive will be equal to the current going to the drive. Sigma current can also be considered as asymmetrical signals in multiple conductors, whose currents can be capacitively coupled to the ground conductor.
Overloads
The primary symptoms accompanying a motor overload are excessive current draw, insufficient torque and overheating. Excessive motor heat is the main cause of motor failure. If the motor is overloaded, individual motor components including bearings, motor windings and other components may operate without issue, however the motor will continue to overheat. Therefore, it would be logical to check for motor overload and start troubleshooting. As 30% of all motor failures are caused by overloading, it is important to understand how to measure and identify a motor overload.
Misalignment
Misalignment occurs when the motor drive shaft is not correctly aligned to the load, or when the component that couples the motor to the load is misaligned. Many professionals believe that a flexible coupling would eliminate and compensate for misalignment, however a flexible coupling only protects the coupling against misalignment. Even with a flexible coupling, a misaligned shaft transmits cyclical forces that damage the motor along the shaft, causing excessive wear in the motor and an increase in the apparent mechanical load. Misalignment may also feed vibration into both the load and the motor drive shaft.

Shaft Imbalance
Imbalance is a condition in the rotating part, where the center of mass does not lie on the axis of rotation. In other words, there is a “heavy spot” somewhere on the rotor. Although you may never completely eliminate motor imbalance, you can identify when it goes out of the normal range of tolerance and take action to solve the issue. Imbalance can be caused by many factors, including the following:
- Dirt accumulation
- Missing balance weights
- Production variations
- Uneven mass and other wear-related factors in motor windings.
Shaft Looseness
Misalignment occurs when the motor drive shaft is not correctly aligned to the load, or when the component that couples the motor to the load is misaligned. Many professionals believe that a flexible coupling would eliminate and compensate for misalignment, however a flexible coupling only protects the coupling against misalignment. Even with a flexible coupling, a misaligned shaft transmits cyclical forces that damage the motor along the shaft, causing excessive wear in the motor and an increase in the apparent mechanical load. Misalignment may also feed vibration into both the load and the motor drive shaft. There are a few types of misalignment:
- Rotating looseness is caused by excessive gaps between the rotating and stationary elements of the machinery, such as the bearing.
- Non-rotating looseness occurs between two parts that are normally in stationary condition, such as a foot and a foundation, or a bearing housing and a machine.

Bearing Wear
A failed bearing increases friction, emits more heat and has lower efficiency due to mechanical, lubrication-related or wear-related issues. Bearing failures affect the entire motor and progress very quickly. According to the survey of A. BONNETT AND C. YUNG, the most common cause of electric motor failure is bearing issues accounting for 51% of total failure. Therefore, it is important to understand bearing failures well for correct intervention.
In general, the causes of bearing failures can be listed as follows.
- A heavier load than designed for
- Shaft misalignment
- Incorrect fit
- Induced shaft voltages
Electric motors are one of the most fundamental components of the manufacturing industry. With the developing technology and digitalisation, we can now monitor motors much more closely and detect failures months in advance. Understanding the root causes of failures of electric motors will also help us in determining the correct predictive maintenance method.
